





<特長>
<用途>

![]()
|
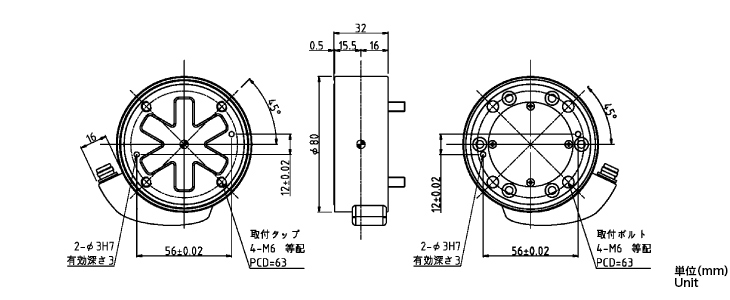
型式 Type |
LFS80-200-4 |
耐荷重 Load bearing capacity |
定格の500% 500% of rated range |
|---|---|---|---|
|
定格 Rating |
Fx,Fy,Fz:200[N] Mx,My,Mz:4[N・m] |
直線性誤差 Linearity error |
定格の3%以下 Less than 3% of rated range |
|
外形 Outline |
φ80×32h |
ヒステリシス Hysteresis |
定格の3%以下 Less than 3% of rated range |
|
取付 Installation |
M6 タップ穴 4ヵ所 M6 tapped hole ×4 |
応答周波数 Response frequency |
1.2kHz |
|
力検出方式 Force detection method |
ひずみゲージ式 Strain gauge |
センサ部使用温度/湿度 Sensor Usable Temp. Hum. |
0℃~50℃ / 0~85%RH 結露、氷結なきこと No condensation, No freezing |
|
電源電圧/消費電流 Power |
DC 24V / DC 30mA |
インターフェース Interface |
RS-422 |
|
センサ本体重量 Sensor body weight |
約330g(ケーブル含まず) About 330g(Cable not included) |
||
※1. 仕様は、予告無く変更することがあります。
※2. 上記以外の定格のセンサについては、お問い合わせ下さい。
<特長>
<用途>

![]()
|
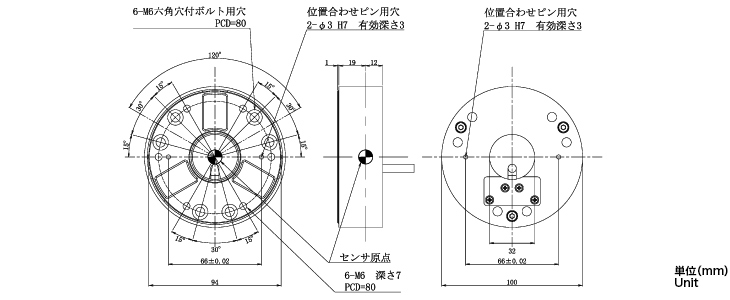
型式 Type |
LFS100-500-10 |
耐荷重 Load bearing capacity |
定格の500% 500% of rated range |
|---|---|---|---|
|
定格 Rating |
Fx,Fy,Fz:500[N] Mx,My,Mz:10[N・m] |
直線性誤差 Linearity error |
定格の3%以下 Less than 3% of rated range |
|
外形 Outline |
φ100×32h |
ヒステリシス Hysteresis |
定格の3%以下 Less than 3% of rated range |
|
取付 Installation |
M6 タップ穴 6ヵ所 M6 tapped hole ×6 |
他軸干渉誤差 Other axis interference |
定格の±5%以下 Less than ±5% of rated range |
|
力検出方式 Force detection method |
ひずみゲージ式 Strain gauge |
応答周波数 Response frequency |
1.2kHz |
|
電源電圧/消費電流 Power |
DC 5V / DC 120mA |
センサ部使用温度/湿度 Sensor Usable Temp. Hum. |
0℃~50℃ / 0~85%RH 結露、氷結なきこと No condensation, No freezing |
|
インターフェース Interface |
RS-422/USB |
センサ本体重量 Sensor body weight |
約400g(ケーブル含まず) About 400g(Cable not included) |
※1. 仕様は、予告無く変更することがあります。
※2. 上記以外の定格のセンサについては、お問い合わせ下さい。
![]()
![]()